I am planning to use it to directly control the gen 5 Haldex pump which is a PWM controlled pump.
In the diff control strategy I see that only H-bridge 1234B can be selected for PWM control.
1.Does it mean that it can only GND control the haldex pump and I need to wire it to switched 12V and PWM control it with Gnd ?
2. I found on various resources that the Haldex gen5 pump can draws up to 15 Amps of current where the H-Bridge current limit is 7.5 A.
Is it possible to use 2 synced H-Bridge outputs like 3B and 4B in order to bypass the current limitation? I did not find such an option in tha latest 222 experimental software version for EMU Pro for Diff Control.
PS: Ecumaster tech support couldn’t assist with any suggestion.
No. Every h-bridge output can be switched to ground or supply.
The limitation is that only one output per H-bridge can have active PWM.
It’s not possible to sync single outputs in H-bridges.
You can only sync full bridges with each other.
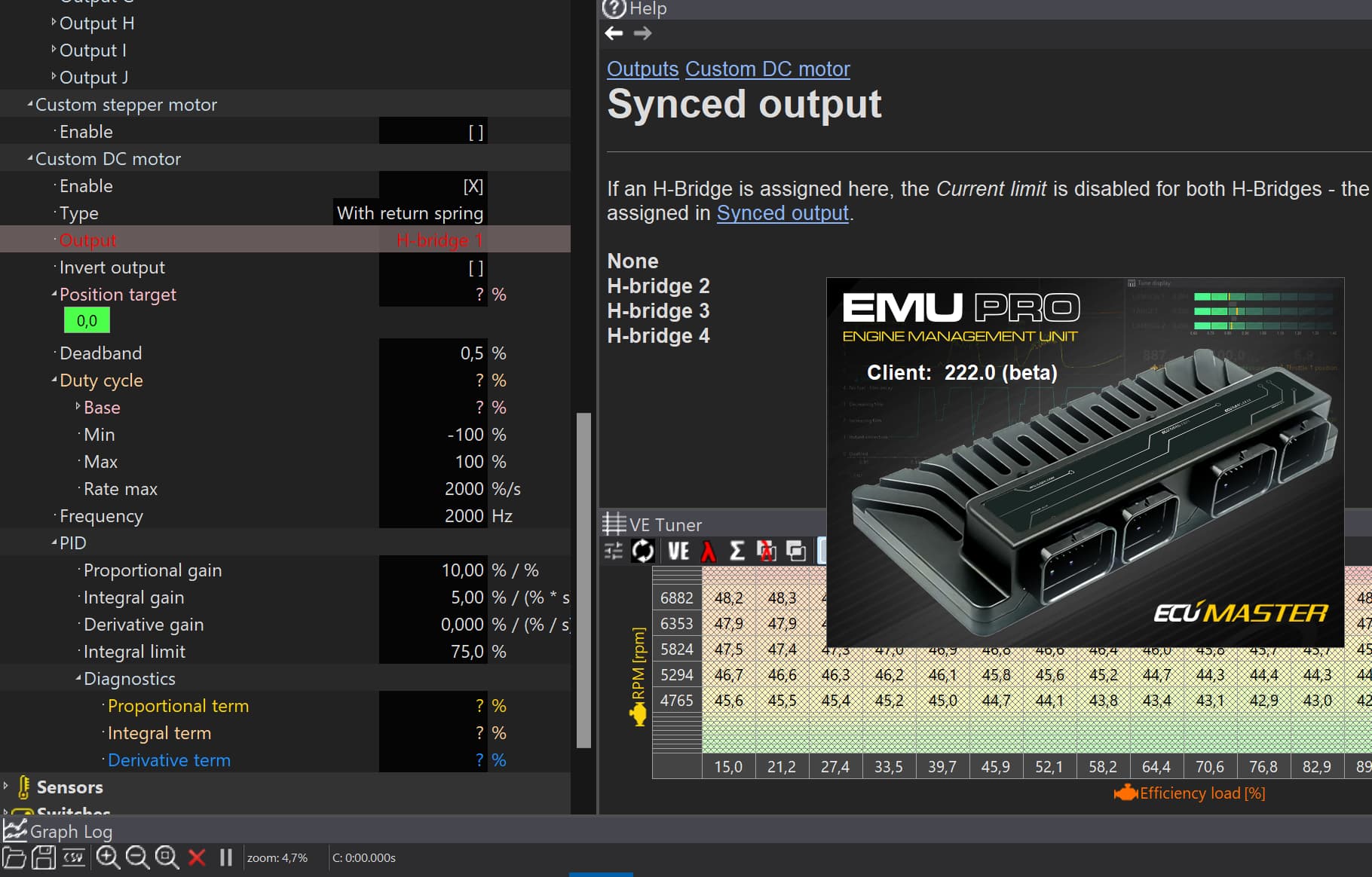
The only solution to this is by using the “Custom DC motor” strategy.
In that strategy, you have to assign a full bridge, which means both outputs A and B will be assigned. Now, depending on the direction, output A is grounded, and output B has a positive PWM, or vice versa.
The output with PWM can be used to control the haldex, and the second will stay unused. The con of that solution is that one h-bridge output goes to waste (can’t be used for anything). With that strategy, you can also use synced bridges, so you could double up the outputs and get a higher maximum current. But you need two full bridges for that, so now two outputs are wasted.
I would like to use the Differential stragey with two full H-Bridgees in sync without using the Custom DC in order to have all the other parameters that are there in the DIfferential control besinde the DC value.
That seems like a good feature that we should be able to add.
The problem is, I can’t give you any timeline for that, because we have a lot of high-priority tasks.
I think it should be possible to achieve the same functionality in the custom DC motor strategy.
You can add 4th dimension to the DC table, and use the Z slices as tables for acceleration, braking, handbrake, or launch control. You need to create a new channel in the project tree that combines those states and use it as the Z axis in the DC table.
For the time being I wired a solid state relay in order to use the Differential control strategy. Did not test the pump control yet, car is still in progress.