Hi,
i am useing SW 3.029 atm and played a bit with DBW CAN control and cruiscontrol and both seem to have strange interactions with overrun:
I send 70% DBW via CAN, which is executed, but if i release the pedal, the overrunstrategy gets active and cuts the fuel:
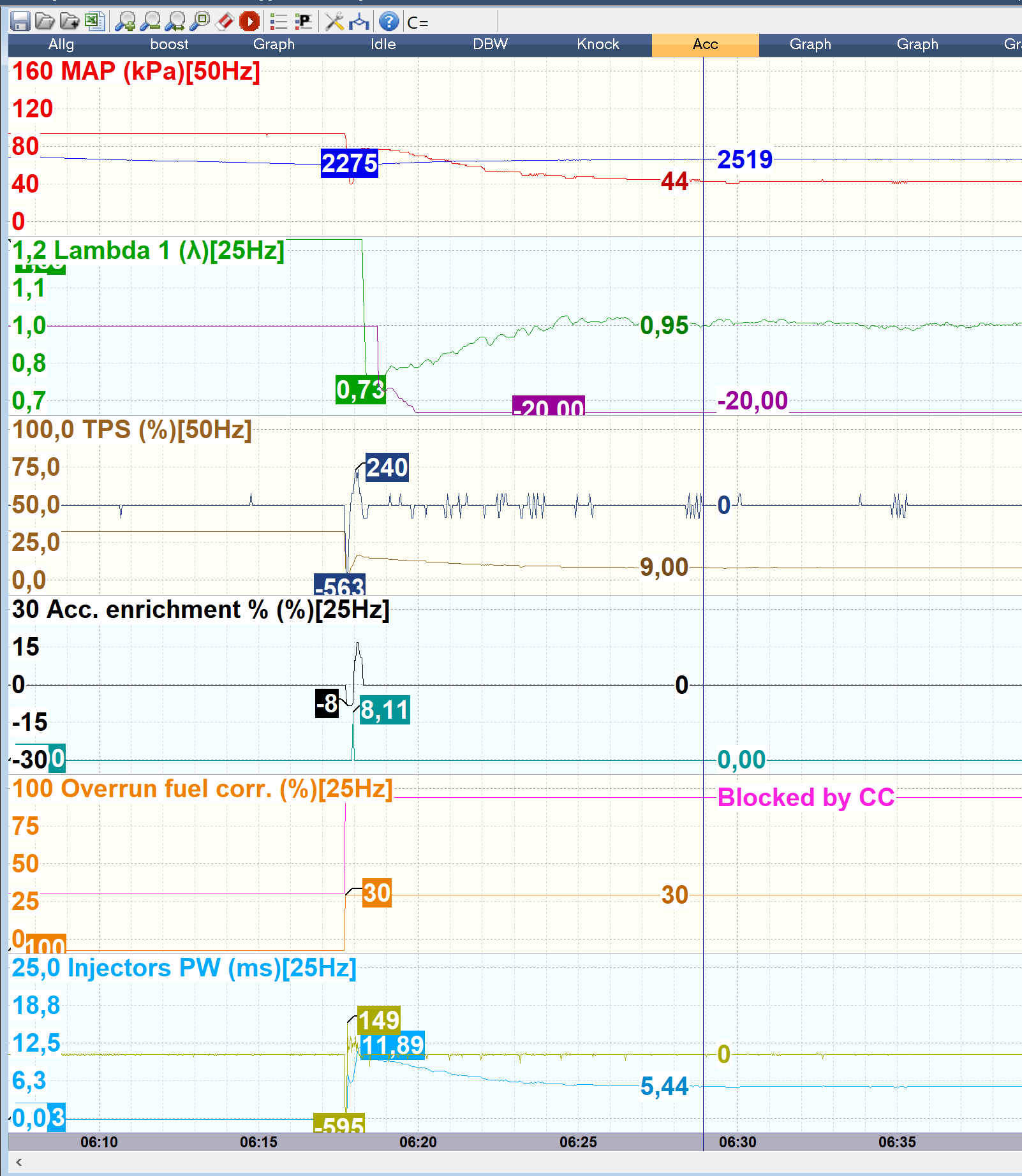
Similar things happen when i use cruiscontrol. It is working here, but somehow overrun strat is adding 30% enrichment from exit strat:
It says it is blocked by CC…but the short term trim runs into its maximum of -20%, which means it is not blocked.
Here some logs + mapping:
AudiTT_AJQ_rev43_CC.emub3 (61.0 KB)
20240623_2022_rev42_CANDBWfail.emublog3 (185.5 KB)
20240623_2047_rev42_strangeCC2.emublog3 (1.1 MB)
Ok I will analyze it.
DBW CAN control and overrun needs some thinking 
I here have a log, where the overrun CC issue is good visible in the end.
20240708_1937_rev56_CC.emublog3 (572.5 KB)
AudiTT_AJQ_rev56_accrich.emub3 (61.3 KB)
I first activate CC while overrun is not active → CC behaving as intended
Then i activate CC via resume while overrun is active → CC gets active, but overrun adds 30% fuel permanently.
By the way…does this table have any impact?

For me it seems to have no effect.
It is a key table for CC.
If you set PID coefficients to 0 you will see that it works.
So the idea is on the flat road on different gears you try to find the throttle position the vehicle keeps the defined speed.
Then when you activate CC this value will be used for the TPS target until the strategy entters the target margins when the PID starts to alter the throttle. So you can use small margin like 20km/h.
I also understood this table as u discribe it and i really like the idea and the theoretical improvements in cruiscontrol…but sadly it doesn’t work. The table has 0 impact in my setup. If PID is off then throttle is and stays at 0 when CC is active.
I think CC is hyper buggy at the moment and not usable in this state.
I see following bugs:
- if CC is activated during overrun…fuel enrichment from overrun exit stays active
- Throttle target table not working
- new plus and minus function not working
- If CC is active and vehicle speed exceeds targetspeed, throttle target is set to 0
I upload some more logs this evening.
The table and strategy worked before as we tested internally (except the overrun). However maybe something broke. We will test it and fix asap.
i can confirm problem wit the overrun and feed forward table (it reads only fromt he 1st column)
The target increase feature seems to work correctly, but I will take a look at your log.
Plz also have a look on this part of my logs:
Why here throttle is closed so fast when target speed is reached? Is this related to the not working feed forward?
Regarding plus minus…found a problem in my settings/log…plus/minus is activated at the same time…so issue is on my side probably.
yes. in the first colum of feed forward table you have 0. so pid correction is 0 or negative + feed forward 0
I actually can’t remember the exact PID settings in this log, but i think i choose a very weak PID with just a small I portion to exclude the situation u describe.
Can be seen that TPS very slowly rises after i release pedal after CC is active after VS droped a bit.
So in this situation PIDs I portion should have an relevant positiv value. PID correction in this situation should just be 0 or negative when P portion only is present.
But anyhow…i try again when u fixed the two known issues
Both issues are already fixed. The new version will be available Friday evening.
Also overrun is disabled when throttle is controlled via CAN
CC and CAN DBW works really well now. CC is so much better than in V2 now. Thx for that
But i found a small bug in CC, related to what i claimed above.
When target speed is exactly the same as current speed i sometimes expirience a jerking caused by sudden throttle movements.
According the logs it seems, that when VS is exactly CC target, the PID seems to be turned of (I portion gets lost) and just value from table is taken. Then if VS is again slightly above or below CC target PID value comes back.
In the debug PID message u can see that Integral value is at around 5 in this situation.
This is not caused by P portion. I also tried it with P portion 0. Also my P portion of 2 doesn’t explain a TPS jump of >5% with a speed difference of 0,5.
Would be nice if u could have a look at this
20240713_1237_rev59_CC.emublog3 (475.5 KB)
yes of course I will check.
I tried ur CC fix version. It seems, that in this version the I portion of CC PID doesn’t have any impact. So issue is solved…but PID not working properly.
20240714_1807_CCfix_notfixed.emublog3 (1.1 MB)
I’m actually on vacation, I will check it and fix as soon as I come back to the office.
No hurry…enjoy ur vacation
Seems like u are something like a one man show in this V3 project. If it is really like that u earn a lot of respect for all what u are doing.
Actually the team works on Pro and DI.
The V3 is my personal project
The v2 was also written by me, but after years I know how to make it much better
Howewer two of our application engineers are testing the firmware internally.